道路標高値付きルート検索が支えるEVトラック。地図の高さデータを活用したルートの消費電力量予測で、CO2削減!!?



道路標高データを、ご存知でしょうか?
文字通り、道路の標高(高さ)を示す地図データです。
2次元の地図では並行(もしくは上下)に重なる一般道と高速道路、どちらの道路を走っているかをカーナビが区別できるのは、道路標高データがあるからです。
道路標高データは最近では自動車開発の分野で、欠かせない存在になっています。
自動車開発のシミュレータ、自動車の燃費、電気自動車の電費、排ガスの予測計算、シミュレーションなどに多くのお問い合わせを頂いております。
MapFan APIでは、この道路標高データを利用してルートの形状点に標高値(m)を付加したルート検索結果(「標高値付きルート検索」)を取得可能です。
「標高値付きルート検索」を利用することで、自動車の燃費、EV車の電費、排ガスの予測計算、シミュレーションなどへの活用が可能です。

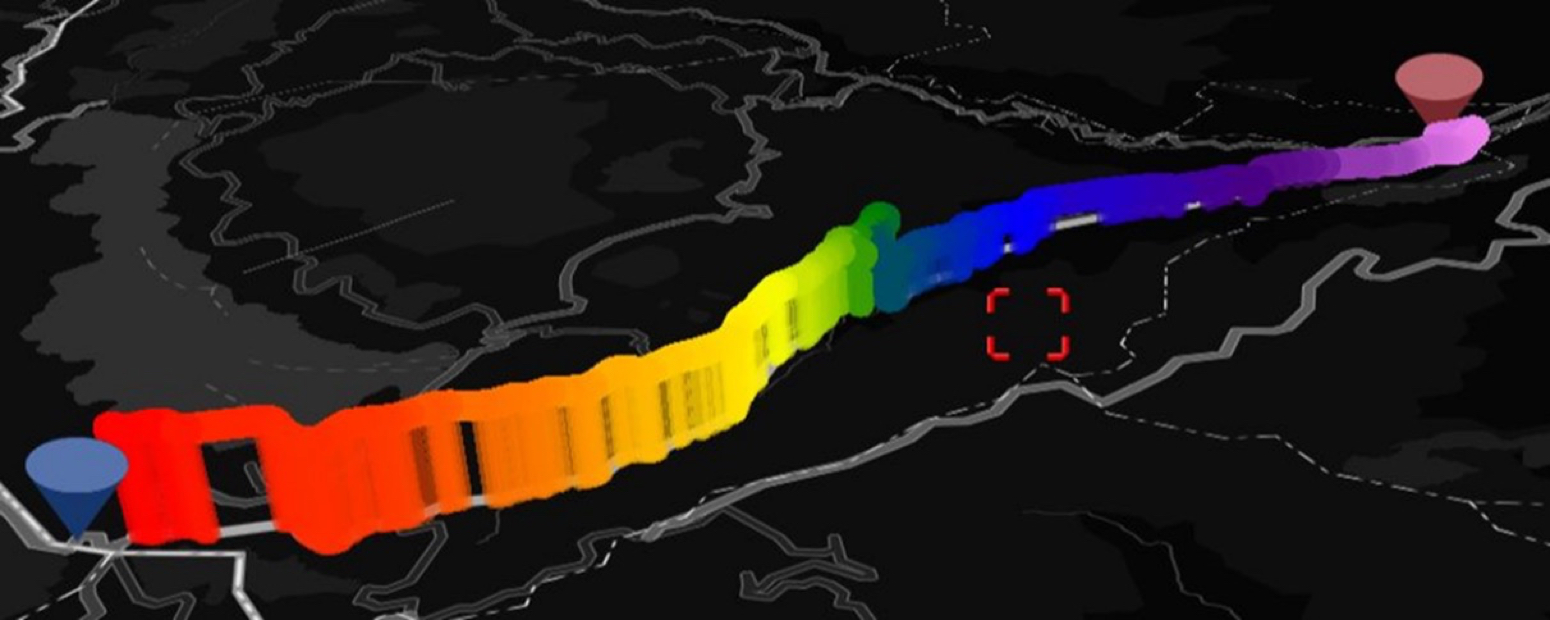
※上のグラフは標高値を示したイメージです。
※上記ルートは駅伝でも有名な高低差のある箱根のルートです。
今回はこのMapFan API「標高値付きルート検索」を利用した、株式会社サニックス様のEVトラックプロジェクトを紹介いたします。(以下敬称略)
EVトラック「PRE-EV」とは?―EVトラックとディーゼルトラックのいいとこどり!
EVトラック「PRE-EV」はディーゼルと回生電力を用いた発電装置を搭載した、山形発のEVトラックです。PRE-EVとはPlug-In Range Extender Electric Vehicleの略称です。
基本は事前に拠点で充電した電気を用いて、EVトラックとして走行します。しかし長距離の走行の際は、目的地まで辿り着けるよう、必要に応じて搭載された発電装置を使用しながら走行します。いわば、ディーゼル車とEV車の中間と位置付けることができます。
EV車で多くの人が不安に思うことは、「電気が目的地までもつかどうか」ではないでしょうか。
特に大型車は自家用車に比べて長距離を移動することが多く、EVトラック普及の課題になっています。
一方、ディーゼル車は電気がなくなる心配はないものの、EV車に比べてCO2の排出量が大きくなります。EV車でも発電の際にCO2は発生しますが、それでもディーゼル車に比べるとEV車の方が断然クリーンです。
このEV車とディーゼル車の欠点を補いあったEVトラックが、「PRE-EV」です。
事前の電費(燃費)計算予測と、運行中の再計算によるリアルタイムの修正
「PRE-EV」には、計画発電蓄電制御システム(SGCCS[Scheduled Generating and Charging Control System])が搭載されています。このシステムは、事前に目的地までの移動に必要な電力を計算し、発電計画を立てて走行するシステムです。
車内に設置されたGPS搭載のコンピュータで、事前に走行計画を作成し、走行中はその計画通りに走行しているかをリアルタイムで監視し、計画通りになっていない場合は、直ちに計画を修正します。
 計画発電蓄電制御システム(SGCCS)はMapFan APIの「標高値付きルート検索」を使用して、事前にルートの起伏を確認。その結果に応じて、CO2発生の無い回生電力を最大限活用し、目的地での充電時間に合わせた電池残量まで電気を使用して走行するルート計画を立てます。
計画発電蓄電制御システム(SGCCS)はMapFan APIの「標高値付きルート検索」を使用して、事前にルートの起伏を確認。その結果に応じて、CO2発生の無い回生電力を最大限活用し、目的地での充電時間に合わせた電池残量まで電気を使用して走行するルート計画を立てます。
上り坂ではフラットな道よりも電力が必要になります。
逆に下り坂では消費電力が少なくなり、さらにブレーキ制動による回生電力を用いた発電が可能です。
曰く、「自転車でも、坂道を上るのは大変です。自分で漕がないからわかりにくいですが、、EVトラックでも同じなのです。」
SGCCSはルートの起伏のほかにも、車重・車速・水平移動電費・回生係数などの要素が考慮され計算します。こうした要素を含めて事前にルートの消費電力量を予測することで、無駄なく電力を使い、CO2排出を極力おさえた長距離走行を達成することができます。
とは言っても、事前の計算通りに進むことはありません。
天候や路面状況、ドライバーの技術によっても、電費は左右されます。さらに車内の空調も電気で動くため、その分も考慮しないといけません。
「PRE-EV」では事前のMapFan API「標高値付きルート検索」を利用した消費電力の予想計算に加え、1秒ごとに再計算を行い、事前計画と乖離が設定値を超えると計画が再作成され、新しい発電計画を実行します。そのため、計画通りにいかず目的地にたどり着けない、ということはなく、常に状況に即した発電と走行が実現できるのです。
山形から世界へ!大型商用車のゼロエミッション化
「PRE-EV」は環境省PJのひとつとして、2019年に発足。サニックスが中心にすすめられました。トラックEV化への障壁が大きな大型貨物車でのCO2削減の取り組みとして企画され、2021年10月には初めての公道走行を行いました。
下の図は、サニックス仙台事務所からサニックス本社(山形)までのルート(国道48号)の走行結果です。ルートの途中には電力を消費する上り坂関山峠(標高650m)が存在し、これを超えないと目的地にいけません。山地が多い日本では、走行距離だけではなく、電力が必要になる起伏の存在を認識しておく必要があります。
走行前の計算では、関山峠前に登頂に必要な電気を発電で確保し、あとは回生電力と充電した電気で走行する計画であることがわかります。
 そしてこちらが、到着時の結果。出発前に作成した走行計画(SOCチャート)から離れた部分があり再計画を行ったことがわかります。
そしてこちらが、到着時の結果。出発前に作成した走行計画(SOCチャート)から離れた部分があり再計画を行ったことがわかります。
結果的に発電区間は走行計画よりは長くなりましたが、再計算がうまく働き、目標の電力残量で目的地まで到達できました。

このように事前に作成された走行計画から外れてしまってもリアルタイムでずれを確認し自動で修正できるのが、「PRE-EV」の強みです。一連の公道走行からは、「PRE-EV」の基本的な機能が正しく機能することがわかりましたが、一方で雪の日などの走行では計画と実走行が大きくずれてしまう場合もあることもわかりました。今後は使いやすい形にさらに改良し、事業化へ進めていく予定だといいます。
さて、今回はMapFan APIの「標高値付きルート検索」と、それを活用したEVトラック「PRE-EV」の取り組みをご紹介しました。MapFan APIの「標高値付きルート検索」を活用したSGCCS技術が、EVトラックのCO2削減を支えています。今後の「PRE-EV」の取り組みに注目です!
法人向けサービスに関するお問
い合わせはこちらから



